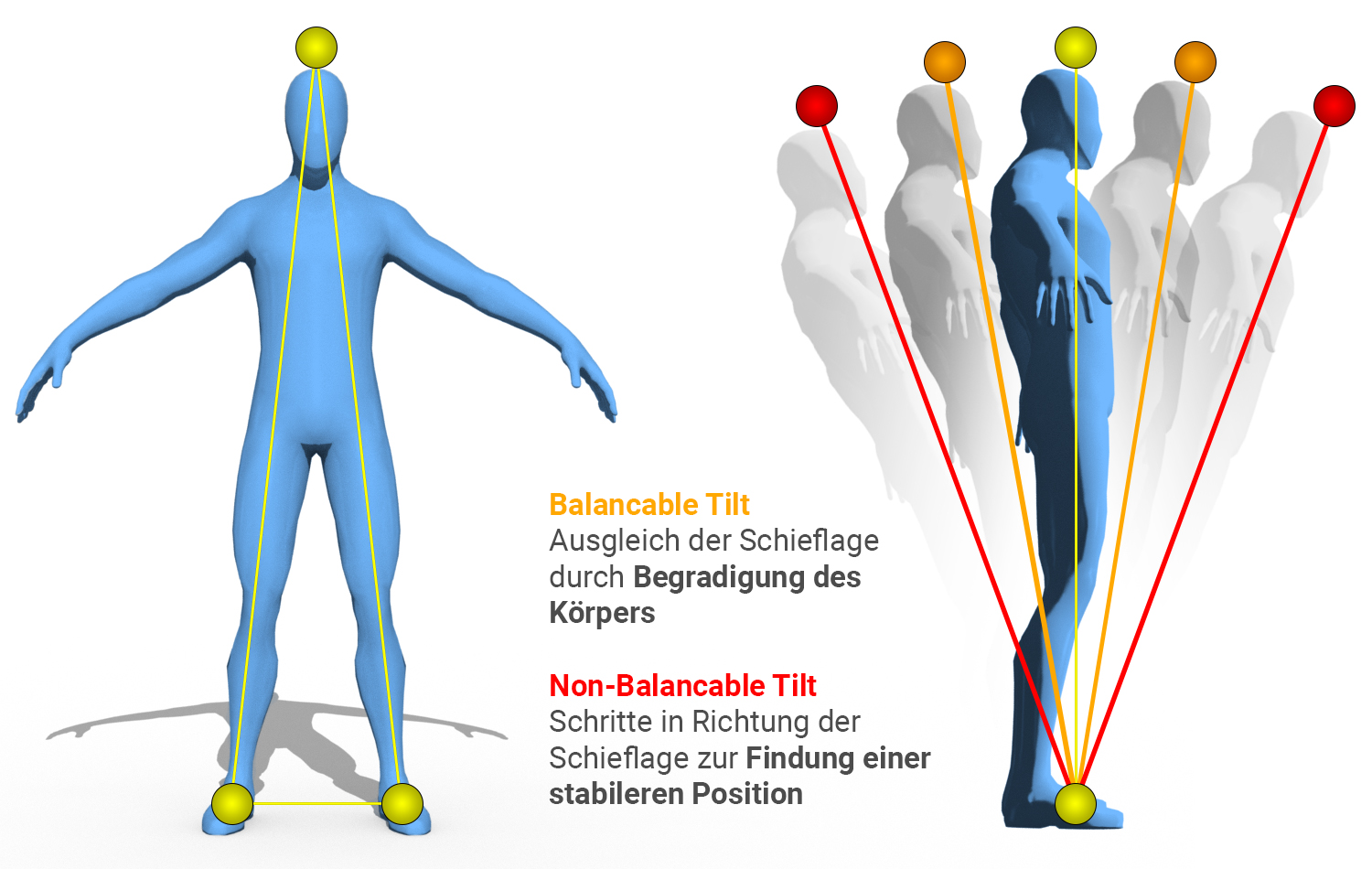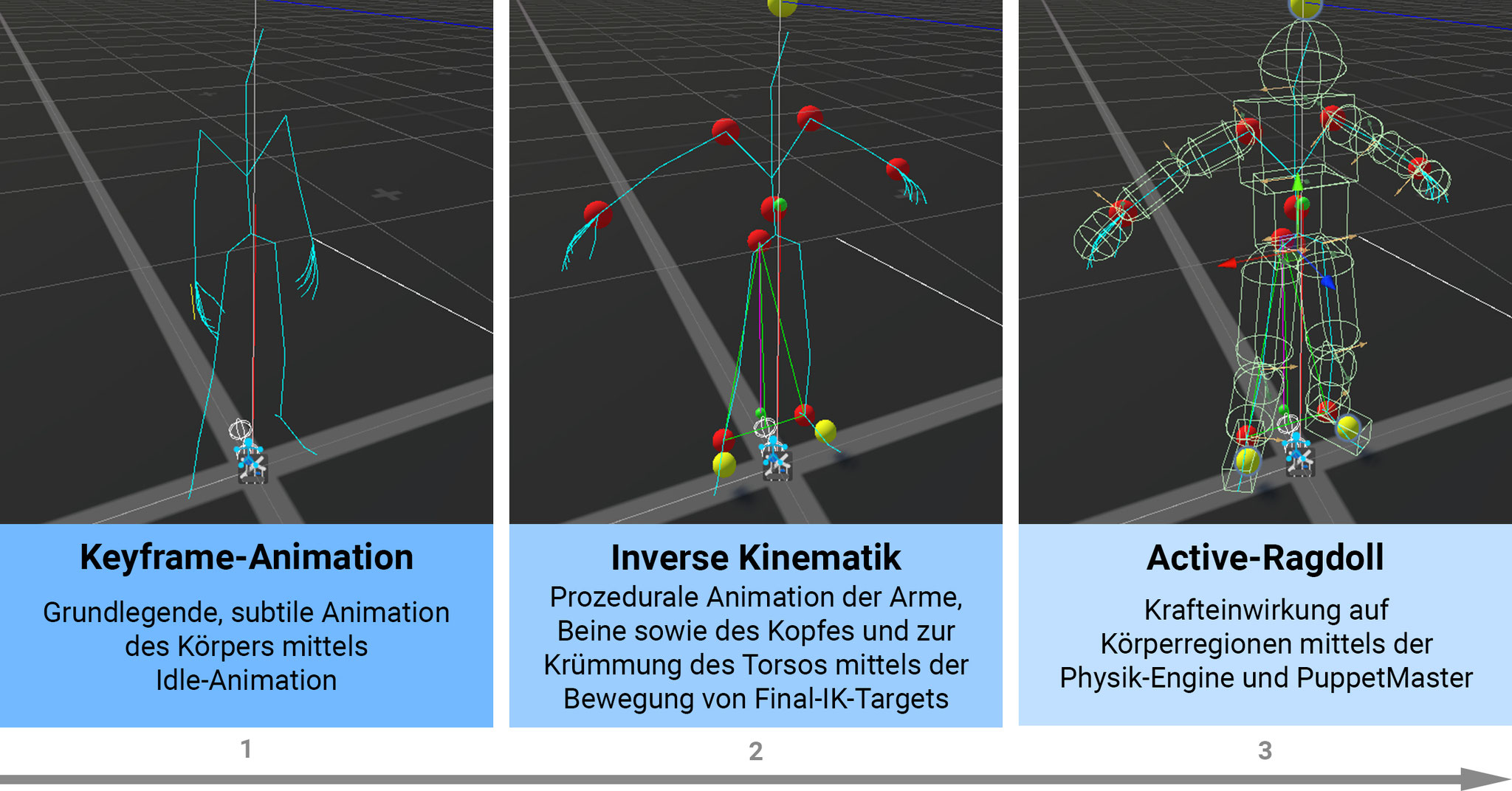

In my master's thesis, I set out to develop a simulation that is comparable to the Dynamic Motion Synthesis (also known as Euphoria) achieved by Naturalmotion. To do this, I used a combination of inverse kinematics and active ragdolls.
Type:
Solo - Master Thesis
Time frame:
3 months part-time
Tools:
Unity Engine, Adobe Mixamo
Credits:
Final IK by RootMotion
PuppetMaster by RootMotion
Male Base Mesh by PolyOne Studio
2023